
Preâmbulo à segunda parte do curso
A segunda parte deste curso lida com integrar funções em subconjuntos $k$-dimensionais de $\mathbb{R}^n$, com $1\leq k \leq n-1$, a que chamaremos variedades (diferenciais), algo que envolverá simultaneamente o cálculo diferencial e o cálculo integral e que talvez impropriamente designamos aqui por geometria diferencial. A seguir definimos e caracterizamos de várias maneiras tais objectos $k$-dimensionais. As páginas subsequentes lidam, após uma aplicação a problemas de extremos condicionados, com os protótipos deste estudo para linhas, que incluem variedades $1$-dimensionais e uniões finitas de variedades $1$-dimensionais. Isso envolverá analisar o conceito de comprimento e resultará na definição do integral em ordem ao comprimento de arco e do integral de linha. Passar a lidar com as situações correspondentes a $k\gt 1$ exigirá necessariamente voltar a encarar o conceito de integral e estabelecer o análogo do teorema de mudança de variáveis na integração, agora no contexto de funções de $2$ ou mais variáveis. O nosso objectivo final será o estabelecimento de teoremas que são análogos do teorema fundamental do cálculo e regra de Barrow neste contexto.
Variedades
Um subconjunto de $\mathbb{R}^n$ que numa vizinhança de cada um dos seus pontos pode ser transformado através de uma mudança de variáveis $C^1$ num subconjunto aberto de um subespaço de dimensão $d$ de $\mathbb{R}^n$ vai ser designado como uma variedade (diferenciável) de dimensão $d$. No caso de $d=1$ ou $d=2$ obteremos alguns dos subconjuntos de $\mathbb{R}^n$ a que informalmente damos o nome de linhas ou superfícies. Para formular de uma forma precisa o conceito de variedade e estabelecer caracterizações equivalentes do conceito vamos precisar de dois instrumentos técnicos já conhecidos, o teorema da função inversa e o teorema da função implícita.
Exemplo. Considere o subconjunto de $\mathbb{R}^3$, que costumamos designar por (superfície de uma) esfera (de raio $1$ centrada em $(0,0,0)$), definido por \[\begin{equation}\begin{split} S^2=\{(x,y,z)\in\mathbb{R}^3:x=\cos \theta \operatorname{sen}\phi, y= \operatorname{sen} \theta \operatorname{sen}\phi, z= \cos\phi, \\ \theta\in [0,2\pi], \phi\in [0,\pi]\}. \end{split}\label{esfera:1}\end{equation}\]

Ficheiro original da autoria de Geek3 licenciado de acordo com CC BY-SA 3.0. Não foram realizadas alterações aos ficheiros incluídos.
{kind=link}
Note que ($\ref{esfera:1}$) é uma definição que usa o contradomínio de uma aplicação $\boldsymbol{r}:\mathbb{R}^2 \supset [0,2\pi]\times [0,\pi] \to \mathbb{R}^3$ definida por $\boldsymbol{r}(\theta,\phi)=(\cos \theta \operatorname{sen}\phi,\operatorname{sen} \theta \operatorname{sen}\phi,\cos\phi)$. Nitidamente $S^2$ é um conjunto que queremos designar como uma variedade-$2$ (ou variedade bidimensional). Este tipo de descrição de uma variedade designa-se como sendo por representações paramétricas. $\boldsymbol{r}$ é uma representação paramétrica e designamos $\theta$ e $\phi$ como parâmetros.
Relembremos no entanto que já encontrámos $S^2$ como sendo $\partial B_1(\boldsymbol{0})$, a fronteira da bola de raio $1$ centrada em $\boldsymbol{0}$, e, nessa altura, o que nos conviu foi considerar como descrição do conjunto correspondia a \[\begin{equation}\partial B_1(\boldsymbol{0})=\{(x,y,z)\in\mathbb{R}^3: x^2+y^2+z^2=1\}.\label{esfera: 2}\end{equation}\] Nesta forma descrevemos $S^2$ como um conjunto de zeros de uma aplicação $F:\mathbb{R}^3 \to \mathbb{R}$ definida por $F(x,y,z)=x^2+y^2+z^2-1$. Dizemos que esta é uma representação implícita de $S^2$.
Existe ainda uma outra forma de lidar como $S^2$. Poderíamos ter considerado $S^2$ como a união de gráficos de funções definidas em subconjuntos de $\mathbb{R}^2$ com valores $\mathbb{R}$. Por exemplo, $S^2=H_N\cup H_S$ com \[\begin{align}H_N & =\left\{(x,y,z)\in\mathbb{R}^3: z=\sqrt{1-x^2-y^2}, (x,y)\in \overline{B}_1(0,0)\right\},\\ H_S & =\left\{(x,y,z)\in\mathbb{R}^3: z=-\sqrt{1-x^2-y^2}, (x,y)\in \overline{B}_1(0,0)\right\}.\end{align}\] Designaremos este processo para descrever $S^2$ como sendo uma representação explícita. Fim de exemplo.
A formulação rigorosa do conceito de variedade pode ser feita à custa de estendermos qualquer uma das três perspectivas que considerámos no exemplo anterior. Optaremos por definir variedade através de representações paramétricas mas os nossos primeiros resultados serão exactamente estabelecer caracterizações equivalentes usando representações explícitas ou representações implícitas. As demonstrações envolverão os teoremas da função inversa e da função implícita. Um tema recorrente do que iremos fazer será exactamente verificar que estabelecemos propriedades relativas a variedades de uma forma independente da representação utilizada, nomeadamente quando estudarmos integração sobre variedades.
Definição (Variedade diferenciável). Sejam $k$ um inteiro não negativo, $n$ um inteiro positivo com $k\leq n$ e $j$ um inteiro positivo ou $\infty$. Um conjunto não vazio $M\subset\mathbb{R}^n$ diz-se uma variedade diferenciável de dimensão $k$ e classe $C^j$ se, para cada $\boldsymbol{x}_0\in M$ existir um aberto $U\subset\mathbb{R}^k$, uma aplicação $\boldsymbol{r}: U\to \mathbb{R}^n$, $\boldsymbol{r}\in C^j(U)$, um aberto $V\subset\mathbb{R}^n$ tal que $\boldsymbol{x}_0\in V\cap M = \boldsymbol{r}(U)$, $\boldsymbol{r}$ é injectiva e com inversa contínua, e $D\boldsymbol{r}$ injectiva em todos os pontos de $U$.
Exemplo. Retomamos o exemplo anterior tentando provar que $S^2$ é uma variedade diferenciável de dimensão $2$ e de classe $C^\infty$. Como definimos $S^2$ via uma representação paramétrica $\boldsymbol{r}$, tentamos usá-la para verificar a definição.
Uma primeira dificuldade consiste em $\boldsymbol{r}$ não ter por domínio um aberto nem ser injectiva. No entanto, se restringirmos $\boldsymbol{r}$ a ${]0,2\pi[}\times{]0,\pi[}$, esta restrição, que continuaremos a designar $\boldsymbol{r}$, já é injectiva, definida num aberto, de classe $C^\infty$ e tem inversa contínua. O seu contradomínio contém todos os pontos de $S^2$ excepto um "semi-meridiano" \[L=\{(x,0,z)\in\mathbb{R}^3: x^2+z^2=1, x\geq 0\}.\] Assim, começamos por lidar com todos os pontos em $S^2\setminus L$. Se $\boldsymbol{r}(\theta_0,\phi_0)=(x_0,y_0,z_0)$ for um tal ponto temos \[J_\boldsymbol{r}(\theta_0,\phi_0) = \begin{bmatrix} -\operatorname{sen}\theta_0 \operatorname{sen}\phi_0 & \cos\theta_0 \cos\phi_0 \\ \cos\theta_0 \operatorname{sen}\phi_0 & \operatorname{sen}\theta_0 \cos \phi_0 \\ 0 & - \operatorname{sen}\phi_0 \end{bmatrix}\] Para que a aplicação linear definida por uma tal matriz seja injectiva a matriz deverá conter duas linhas linearmente independentes qualquer que seja o $(\theta_0,\phi_0)\in{]0,2\pi[}\times {]0,\pi[}$. Para verificarmos esta condição (que deve ser quase evidente pois, excepto nos pólos, $\frac{\partial\boldsymbol{r}}{\partial\theta}$ e $\frac{\partial\boldsymbol{r}}{\partial\phi}$ são não nulas e definem rectas tangentes a um meridiano e a um paralelo que são ortogonais) calculamos os determinantes das submatrizes jacobianas $2\times 2$. Obtemos: \[\begin{align*}\det \frac{\partial(x,y)}{\partial(\theta,\phi)} & = \det\begin{bmatrix}-\operatorname{sen}\theta_0 \operatorname{sen}\phi_0 & \cos\theta_0 \cos\phi_0 \\ \cos\theta_0 \operatorname{sen}\phi_0 & \operatorname{sen}\theta_0 \cos \phi_0\end{bmatrix} = -\operatorname{sen}\phi_0\cos\phi_0 \\ \det \frac{\partial(x,z)}{\partial(\theta,\phi)} & = \det\begin{bmatrix}-\operatorname{sen}\theta_0 \operatorname{sen}\phi_0 & \cos\theta_0 \cos\phi_0 \\ 0 & -\operatorname{sen} \phi_0\end{bmatrix} = \operatorname{sen}\theta_0\operatorname{sen}^2\phi_0 \\ \det \frac{\partial(y,z)}{\partial(\theta,\phi)} & = \det\begin{bmatrix} \cos\theta_0 \operatorname{sen}\phi_0 & \operatorname{sen}\theta_0 \cos \phi_0 \\ 0 & -\operatorname{sen} \phi_0\end{bmatrix} = -\cos\theta_0\operatorname{sen}^2\phi_0\end{align*} \] Como $\phi_0\in \; ]0,\pi[$ temos $\operatorname{sen}^2\phi_0\gt 0$ e daí que os valores dos dois últimos subdeterminantes não se podem anular simultaneamente.
Resta-nos lidar com os pontos de $L$. Faça-o considerando uma representação paramétrica adicional obtidas de $\boldsymbol{r}$ por permutação de $x$, $y$ e $z$ na sua definição (cujos pólos estarão em $(0,1,0)$ e $(0,-1,0)$). Fim de exemplo.
Exemplo. No exemplo anterior não oferece dúvidas que as inversas das representações paramétricas usadas na verificação são contínuas. Para que o leitor não duvide que tal condição é de facto necessária para excluir conjuntos que não queremos que sejam variedades considere \[\mathcal{L}=\{(2\operatorname{sen}t, \operatorname{sen}(2t)):t\in\;]0,2\pi[\}.\]
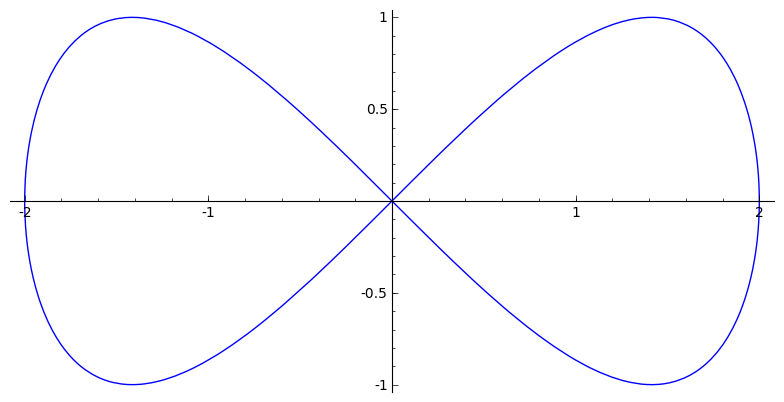
$\mathcal{L}\setminus\{(0,0)\}$ é uma variedade diferenciável de dimensão $1$.
Embora o caminho (representação paramétrica) ${]0,2\pi[}\ni t\mapsto (2\operatorname{sen} t, \operatorname{sen}(2t))$ tenha todas as propriedades desajadas relativamente a um qualquer ponto de $\mathcal{L}$ excepto $(0,0)$, qualquer inversa deste caminho com domínio restringido a uma vizinhança de $(0,0)$ não é uma função contínua. Isto não é suficiente para afirmarmos que $\mathcal{L}$ não é uma variedade pois poderia haver outro caminho que verificasse essas condições. Designemos um tal caminho por $\alpha:\;]a,b[\;\to \mathcal{L}$ em que $(0,0)=\alpha(c)$ com $a\lt c\lt b$. Existe uma vizinhança de $(0,0)$, $V$, tal que $\alpha(]a,b[)=\mathcal{L}\cap V$. Adapte o exercício em que mostrámos que não existia uma aplicação contínua e injectiva definida na união de 3 segmentos no plano com um único ponto em comum e com valores em $\mathbb{R}$, para mostrar que $\alpha^{-1}$ não pode ser contínua. Fim de exemplo.
Para enunciarmos uma das caracterizações equivalentes de variedade diferenciável precisaremos da noção de permutação.
Definição (Permutação em $\mathbb{R}^n$). Uma aplicação linear de $\mathbb{R}^n$ em $\mathbb{R}^n$ diz-se uma permutação se for representada por uma matriz cujos elementos são $0$s ou $1$s e em cada linha ou coluna existe só um elemento que é $1$ sendo os restantes $0$. Fim de definição.
Note que o efeito de uma permutação sobre um vector de $\mathbb{R}^n$ é permutar as coordenadas do vector.
Exemplos. São exemplos de permutações a aplicação identidade e aplicações como \[\begin{align*}(x,y) & \mapsto (y,x) \\ (x,y,z,w)&\mapsto (z,x, y,w).\end{align*}\] É fácil ver que a composição de permutações é uma permutação e que todas as permutações têm uma inversa que também é uma permutação.
Teorema (Caracterizações equivalentes de variedade diferenciável). Um conjunto não vazio $M\subset\mathbb{R}^n$ é uma variedade diferenciável $k$-dimensional de classe $C^j$ se e só se verificar uma das seguintes condições:
- (via representações implícitas) Para cada $\boldsymbol{x}_0\in M$ existir um aberto $V\ni \boldsymbol{x}_0$, uma aplicação $F:V\to\mathbb{R}^{n-k}$, $F\in C^j(V)$, tais que $V\cap M =\{\boldsymbol{x}\in \mathbb{R}^n: F(\boldsymbol{x})=\boldsymbol{0}\}$ e $DF$ é sobrejectiva nos pontos de $V\cap M$.
- (via representações explícitas) Para cada $\boldsymbol{x}_0\in M$ existir um aberto $V\ni \boldsymbol{x}_0$, uma permutação $P$ em $\mathbb{R}^n$, um aberto $U\subset\mathbb{R}^k$, uma aplicação $g:U\to \mathbb{R}^{n-k}$, $g\in C^j(U)$, tais que $V\cap M=\{P(\boldsymbol{t},g(\boldsymbol{t}))\in\mathbb{R}^n: \boldsymbol{t}\in U\} $.
Ideia da demonstração. Vamos estabelecer a equivalência entre as várias caracterizações estabelecendo sucessivamente quatro implicações entre as diferentes caracterizações em que abreviamos RP (caracterização via representações paramétricas, isto é a definição de variedade). RI (caracterização via representações implícitas, isto é a condição 1. no enunciado do teorema) e RE (caracterização via representações explícitas, isto é a condição 2. no enunciado do teorema). Duas destas implicações serão extremamente fáceis de estabelecer mas haverá duas em que intervirão os teoremas da função implícita e da função inversa. Aconselha-se o leitor que se possa sentir intimidado pela notação a, numa primeira abordagem, a particularizar os argumentos ao caso da esfera.
A seguir $M\subset \mathbb{R}^n$ designa um conjunto não vazio e $\boldsymbol{x}_0\in M$ é tal que numa sua vizinhança vale o tipo de representação indicado no lado esquerdo da implicação a demonstrar.
RE $\Rightarrow$ RP
Suponha-se que numa vizinhança de $\boldsymbol{x}_0\in M$ vale como descrição de $M$ nessa vizinhança (já após uma permutação de variáveis se necessário) \[ \begin{cases} x_{k+1} = g_1(x_1,\dots, x_k), \\ \dots \\ x_{n} = g_{n-k}(x_1,\dots, x_k). \end{cases}\] em que as funções $g_1, \dots , g_{n-k}$ são de classe $C^j$. É fácil construir uma representação paramétrica de maneira a verificar RP via \[\boldsymbol{r}(x_1,\dots, x_k) = (x_1, \dots, x_k, g_1(x_1,\dots, x_k), \dots g_{n-k}(x_1,\dots, x_k)).\] Precisamos ainda de verificar que $\boldsymbol{r}$ verifica as propriedades exigidas por RP. Temos que $\boldsymbol{r}$ é obviamente injectiva e a sua inversa é a projecção nas $k$ primeiras coordenadas que verificamos ser contínua. Além disso a matriz jacobiana de $\boldsymbol{r}$ tem a estrutura \[\begin{bmatrix}1 & 0 & \cdots & 0 \\ 0 & 1 & \cdots & 0 \\ \cdots & \cdots & \cdots & \cdots \\ 0 & 0 & \cdots & 1 \\ \frac{\partial g_1}{\partial x_1} & \frac{\partial g_1}{\partial x_2} & \cdots & \frac{\partial g_1}{\partial x_k} \\ \cdots & \cdots & \cdots & \cdots \\ \frac{\partial g_{n-k}}{\partial x_1} & \frac{\partial g_{n-k}}{\partial x_2} & \cdots & \frac{\partial g_{n-k}}{\partial x_k} \end{bmatrix}\] A submatriz identidade $k\times k$ garante que $D \boldsymbol{r}$ é injectiva.
RE $\Rightarrow$ RI
Suponha-se que numa vizinhança de $\boldsymbol{x}_0\in M$ vale como descrição de $M$ nessa vizinhança (já após uma permutação de variáveis se necessário) \[ \begin{cases} x_{k+1}= g_1(x_1,\dots, x_k), \\ \dots & \\ x_{n} = g_{n-k}(x_1,\dots, x_k). \end{cases}\] em que as funções $g_1, \dots , g_{n-k}$ são de classe $C^j$. É fácil construir uma representação implícita de maneira a verificar RI via $F(\boldsymbol{x})=\boldsymbol{0}$ definindo \[F(x_1,\dots, x_n)= (x_{k+1}-g_1(x_1,…,x_k),\dots, x_{n}-g_{n-k}(x_1,…,x_k)).\] Obviamente $F\in C^j$ e a sua matriz jacobiana tem a forma \[\begin{bmatrix}-\frac{\partial g_1}{\partial x_1} & \cdots & -\frac{\partial g_1}{\partial x_k} & 1 & 0 & \cdots & 0 \\ \cdots & \cdots & \cdots & \cdots & \cdots & \cdots & \cdots \\ -\frac{\partial g_{n-k}}{\partial x_1} & \cdots & -\frac{\partial g_{n-k}}{\partial x_k} & 0 & 0 & \cdots & 1 \end{bmatrix}\] A presença de uma submatriz identidade $(n-k)\times (n-k)$ garante que $DF$ é sobrejectiva.
RI $\Rightarrow$ RE
Suponha-se que numa vizinhança de $\boldsymbol{x}_0\in M$ vale como descrição de $M$ nessa vizinhança \[\begin{cases}F_{k+1}(x_1,\dots,x_n)=0, \\ \dots \\ F_{n}(x_1,\dots,x_n)=0.\end{cases}\] com $F=(F_{k+1}, \dots, F_n)$, $F\in C^j$ e sendo a derivada $DF$ sobrejectiva nessa vizinhança. Suponha-se, a menos de uma permutação de variáveis, que é $\det \frac{\partial F}{\partial(x_{k+1},\dots,x_n)}\neq 0$. Então o teorema da função implícita garante que existe uma vizinhança (possivelmente mais pequena) de $\boldsymbol{x}_0$ aonde o sistema anterior define implicitamente uma função $g$ definida na projecção dessa vizinhança em $\mathbb{R}^k$ e com valores em $\mathbb{R}^{n-k}$ tal que $F(x_1,\dots,x_k, g(x_1,\dots,x_k))=0$. Assim \[ \begin{cases} x_{k+1} = g_1(x_1,\dots, x_k), \\ \dots & \\ x_{n} = g_{n-k}(x_1,\dots, x_k). \end{cases}\] define uma representação explícita válida numa vizinhança de $\boldsymbol{x}_0$.
RP $\Rightarrow$ RE
Suponha-se que numa vizinhança de $\boldsymbol{x}_0\in M$ vale como descrição de $M$ nessa vizinhança uma representação paramétrica \[\boldsymbol{x}=r(\boldsymbol{t})\]em que $\boldsymbol{t}\in U\subset\mathbb{R}^k$ com $U$ aberto, $r\in C^j(U)$, $Dr$ injectiva em $U$, $r$ injectiva e com inversa contínua. A matriz jacobiana de $r$ tem uma estrutura \[\begin{bmatrix}\frac{\partial x_1}{\partial t_1} & \frac{\partial x_1}{\partial t_2} & \dots & \frac{\partial x_1}{\partial t_k} \\ \frac{\partial x_2}{\partial t_1} & \frac{\partial x_2}{\partial t_2} & \dots & \frac{\partial x_2}{\partial t_k} \\ \dots & \dots & \dots & \dots \\ \frac{\partial x_k}{\partial t_1} & \frac{\partial x_k}{\partial t_2} & \dots & \frac{\partial x_k}{\partial t_k} \\ \dots & \dots & \dots & \dots \\ \frac{\partial x_n}{\partial t_1} & \frac{\partial x_n}{\partial t_2} & \dots & \frac{\partial x_n}{\partial t_k}\end{bmatrix}\]
Seja $\boldsymbol{t}_0\in U$ tal que $r(\boldsymbol{t}_0)=\boldsymbol{x}_0$. Existem $k$ linhas linearmente independentes da matriz jacobiana de $r$ em $\boldsymbol{t}_0$ que, a menos de uma permutação das variáveis dependentes $x_1,\dots,x_n$, podemos supor que são as $k$ primeiras. Designando por $P_k$ a projecção nas primeiras $k$ coordenadas de $\mathbb{R}^n$, aplique-se o teorema da função inversa à aplicação $P_k\circ r$ em $\boldsymbol{t}_0$. Esta aplicação será então invertível numa vizinhança de $\boldsymbol{t}_0$ com uma inversa local que designamos por $\varphi$ de classe $C^j$. Mas então \[(x_{k+1}, \dots, x_n)=r(\varphi(x_1,\dots,x_k))\] dá-nos uma representação explícita válida para $M$ numa vizinhança de $\boldsymbol{x}_0$.
Fim da ideia de demonstração.
Exemplo (Toro). Sejam $0\lt r \lt R$ e defina-se o toro \[\mathbb{T}^2=\left\{(x,y,z)\in\mathbb{R}^3: \left (\sqrt{x^2+y^2}-R\right)^2+z^2= r^2\right\}.\]
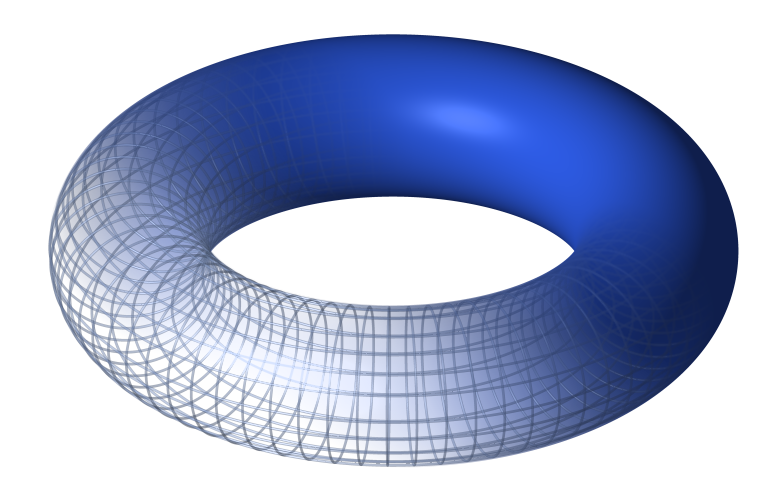
Ficheiro original da autoria de LucasVB no domínio público.
{kind=link}
Note que $\mathbb{T}^2$ pode ser considerado como a superfície que obtemos rodando a circunferência $\left(x-R\right)^2+z^2= r^2$ em torno do eixo dos $zz$.
Vamos verificar que $\mathbb{T}^2$ é uma variedade-2 usando a caracterização de variedade via representações implícitas.
Definimos $F:\mathbb{R}^3\to\mathbb{R}$ via $F(x,y,z)=\left (\sqrt{x^2+y^2}-R\right)^2+z^2- r^2$. Note-se que $F\in C^\infty(\mathbb{R}^3\setminus Z)$ em que $Z$ designa o eixo dos $zz$, $Z=\{(0,0,z)\in\mathbb{R}^3\}$, e que $\mathbb{R}^3\setminus Z$ é um aberto contendo $\mathbb{T}^2$. Além disso $\mathbb{T}^2$ é o conjunto de zeros de $F$ e \[J_F(x,y,z)=\begin{bmatrix}\frac{2x\left (\sqrt{x^2+y^2}-R\right)}{\sqrt{x^2+y^2}} & \frac{2y\left (\sqrt{x^2+y^2}-R\right)}{\sqrt{x^2+y^2}} & 2z \end{bmatrix}.\] A condição de $DF$ ser sobrejectiva nos pontos de $\mathbb{T}^2$ corresponde a existir uma coluna linearmente independente nesta matriz o que se reduz muito simplesmente a existir um elemento não nulo nesta matriz para todos os pontos de $\mathbb{T}^2$. Se $z\neq 0$ tal condição é satisfeita graças ao elemento da terceira coluna. Para concluir basta notar que se $z=0$ em pontos de $T$ então \[J_F(x,y,0)=\begin{bmatrix}\frac{2x\left (\sqrt{x^2+y^2}-R\right)}{\sqrt{x^2+y^2}} & \frac{2y\left (\sqrt{x^2+y^2}-R\right)}{\sqrt{x^2+y^2}} & 0 \end{bmatrix}\] e os elementos da primeira e segunda coluna não podem ser nulos simultaneamente pois sobre $\mathbb{T}^2$ com $z=0$ temos $\left|\sqrt{x^2+y^2}-R\right|=r\gt 0$ e $(0,0,0)\not\in T$. Fim de exemplo.
Exercício. Mostre que se tomarmos $R=r$ na discussão do toro obtemos um conjunto que não é uma variedade. Para tal mostre que a intersecção do conjunto com uma bola centrada em $(0,0,0)$ não é o gráfico de uma função que dê uma variável em função das restantes.
Espaço tangente e espaço normal
Vamos estar interessados em propriedades intrínsecas de variedades, isto é, propriedades que são independentes da forma como descrevemos a variedade. Duas tais propriedades são a noção de espaço tangente e de espaço normal num ponto de uma variedade. A motivação para definirmos espaço tangente é a necessidade de estabelecermos quais são os vectores tangentes a uma variedade num ponto.
Definição (Espaço tangente e espaço normal). Dados uma variedade $M$ e um ponto $\boldsymbol{x}_0\in M$, diz-se que um vector $\boldsymbol{v}\in \mathbb{R}^n$ é tangente a $M$ em $\boldsymbol{x}_0$ se existe um intervalo aberto I de $\mathbb{R}$, um caminho diferenciável $\alpha:I \to M$ tal que $\alpha(\lambda)=\boldsymbol{x}_0$ e $\alpha'(\lambda)=\boldsymbol{v}$ para um certo $\lambda\in I$. Ao conjunto de todos os vectores tangentes a $M$ em $\boldsymbol{x}_0$ dá-se o nome de espaço tangente a $M$ em $\boldsymbol{x}_0$, abreviadamente $T_M(\boldsymbol{x}_0)$. O conjunto de todos os vectores de $\mathbb{R}$ ortogonais a todos os vectores tangentes designa-se por espaço normal a $M$ em $\boldsymbol{x}_0$, $N_M(\boldsymbol{x}_0)$.

Modificação de Tangentialvektor.svg da autoria de McSush no domínio público.
{kind=link}
Proposição. O espaço tangente $T_M(\boldsymbol{x}_0)$ é um subespaço vectorial de $\mathbb{R}^n$ de dimensão igual à da variedade e o espaço normal $N_M(\boldsymbol{x}_0)$ é o seu complemento ortogonal.
Demonstração. Considere-se uma qualquer representação paramétrica $r(\boldsymbol{t})$ válida (no sentido da definição de variedade) para $M$ numa vizinhança de $\boldsymbol{x}_0$ com $r(\boldsymbol{t}_0)=\boldsymbol{x}_0$. Considere-se um caminho $\alpha(\lambda)=r(\boldsymbol{t}_0+\lambda \boldsymbol{w})$ em que $\lambda$ pertence a uma vizinhança suficientemente pequena de $0$. Temos $\alpha(0)=\boldsymbol{x}_0$ e $\alpha'(0)=Dr(\boldsymbol{t}_0)( \boldsymbol{w})$. Verificamos assim que qualquer combinação linear de vectores coluna de $J_r(\boldsymbol{t}_0)$ é um elemento do espaço tangente. Dado que $Dr(\boldsymbol{t}_0)$ é injectiva os vectores coluna de $J_r(\boldsymbol{t}_0)$ são linearmente independentes e o espaço tangente contém o subespaço vectorial de dimensão $k$ de $\mathbb{R}^n$ gerado por estes vectores.
Considere-se agora uma qualquer representação implícita $F(\boldsymbol{x})=\boldsymbol{0}$ caracterizando $M$ numa vizinhança de $\boldsymbol{x}_0$. Um caminho diferenciável $\beta$ com $\beta(0)=\boldsymbol{x}_0$ e $\beta(\lambda)\in M$ numa vizinhança de $0$ verifica $F(\beta(\lambda))=\boldsymbol{0}$ nessa mesma vizinhança de $0$ de maneira que também $DF(\beta(\lambda))\beta'(\lambda)=\boldsymbol{0}$ identicamente nessa vizinhança. Em particular, $DF(\boldsymbol{x}_0)\beta'(0)=\boldsymbol{0}$, pelo que $\beta'(0)$ é ortogonal a qualquer vector $\nabla F_i(\boldsymbol{x}_0)$ com $i=1,\dots,n-k$. Como os $\nabla F_i(\boldsymbol{x}_0)$ são linearmente independentes, devido à sobrejectividade de $DF_i(\boldsymbol{x}_0)$, obtivemos que o espaço tangente está contido no complemento ortogonal dum subespaço vectorial de $\mathbb{R}^n$ de dimensão $n-k$.
Considerando simultaneamente as duas conclusões que já obtivemos, verificamos que o espaço tangente é um subespaço vectorial de dimensão $k$ de $\mathbb{R}^n$, que tanto pode ser explicitado como gerado por uma base formada por todos os $\frac{\partial r}{\partial t_j}(\boldsymbol{t}_0)$ ($j=1,\dots,k$) para qualquer representação paramétrica $r(\boldsymbol{t})$ que descreva $M$ numa vizinhança de $\boldsymbol{x}_0$ com $r(\boldsymbol{t}_0)=\boldsymbol{x}_0$, ou como o complemento ortogonal de um subespaço de dimensão $n-k$ de $\mathbb{R}^n$ gerado por todos os vectores $\nabla F_i(\boldsymbol{x}_0)$ ($i=1,\dots,n-k$) para qualquer representação implícita $F(\boldsymbol{x})=0$ que descreva $M$ numa vizinhança de $\boldsymbol{x}_0$. Fim de demonstração.
Note que o último parágrafo da demonstração anterior dá-nos os processos de cálculo a usar para determinar o espaço tangente ou o espaço normal no caso de $M$ ser descrito por represntações paramétricas ou por representações implícitas. No caso de $M$ ser descrito por representações explícitas podemos usar ou a representação paramétrica ou a representação implícita construídas quando se mostrou que ao termos uma descrição por representações explícitas também temos descrições por representações paramétricas e por representações implícitas. Os exemplos seguintes concretizarão estas observações.
Exemplo. Considere-se a hélice definida por $H=\{(\cos t, \sen t, t): t\in \mathbb{R}\}$. Trata-se de uma variedade unidimensional pois a aplicação $r:\mathbb{R}\to\mathbb{R}^3$ definida por $r(t)=(\cos t, \sen t, t)$ verifica $r\in C^\infty(\mathbb{R})$, é injectiva e com inversa contínua ($r(t)\mapsto t$) com $r'(t)=(-\sen t, \cos t, t)\neq (0,0,0) \forall_{t\in\mathbb{R}}$. No ponto $\boldsymbol{u}_0=r(\frac{\pi}{2})=\left(0,1, \frac{\pi}{2}\right)$ temos $r'(\frac{\pi}{2})=(-1,0,1)$ e consequentemente \begin{align*}T_H(\boldsymbol{u}_0) &=\{(-\lambda,0, \lambda): \lambda \in \mathbb{R}\},\\ N_H(\boldsymbol{u}_0)&=\{(x,y,z)\in\mathbb{R}^3: -x+z =0\}. \end{align*}
Exemplo. Considere-se a esfera $S^2$ e o ponto $P=(\sqrt{3}/3, \sqrt{3}/3, \sqrt{3}/3)$.
Para determinar o espaço tangente e o espaço normal a partir duma representação implícita consideramos $F:\mathbb{R}^3\to\mathbb{R}$ definida por $F(x,y,z)=x^2+y^2+z^2-1$. A representação implícita $F(x,y,z)=0$ caracteriza $S^2$ como variedade-2 pois $F\in C^\infty(\mathbb{R}^3)$ e temos para a respectiva matriz jacobiana \[J_F(x,y,z)=\begin{bmatrix} 2x & 2y & 2z\end{bmatrix}\] que tem um número de colunas linearmente independentes igual a $1$ em pontos de $S^2$.
Temos \[J_F(P)=\begin{bmatrix} 2\sqrt{3}/3 & 2\sqrt{3}/3 & 2\sqrt{3}/3\end{bmatrix}\] pelo que \[\begin{align*}N_{S^2}(P) & =\{(\lambda, \lambda, \lambda)\in \mathbb{R}^3: \lambda\in \mathbb{R}\}, \\ T_{S^2}(P) & = \{(x, y, z)\in \mathbb{R}^3:x+y+z=0\}.\end{align*}\]
Última edição desta versão: João Palhoto Matos, 20/04/2020 14:41:42.